The goal of this paper is to estimate the viewpoint for a novel object.
Standard viewpoint estimation approaches generally fail on this task due to their reliance on a 3D model for alignment or large amounts of class-specific training data and their corresponding canonical pose.
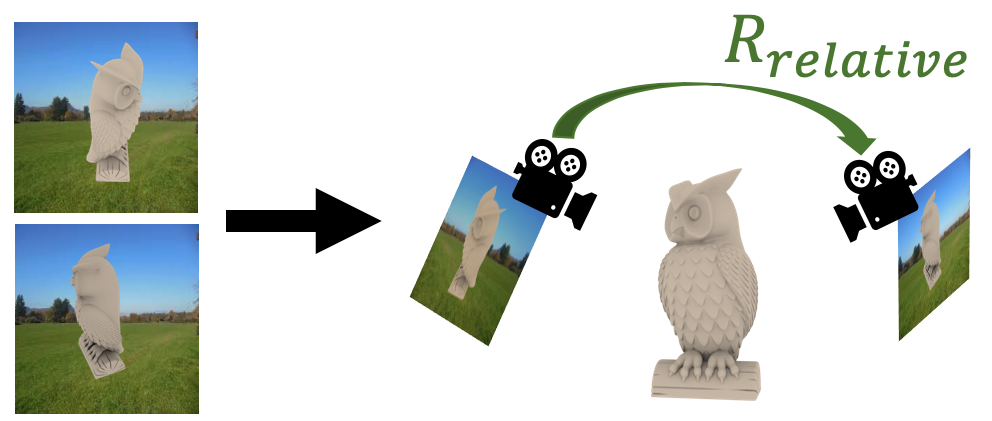
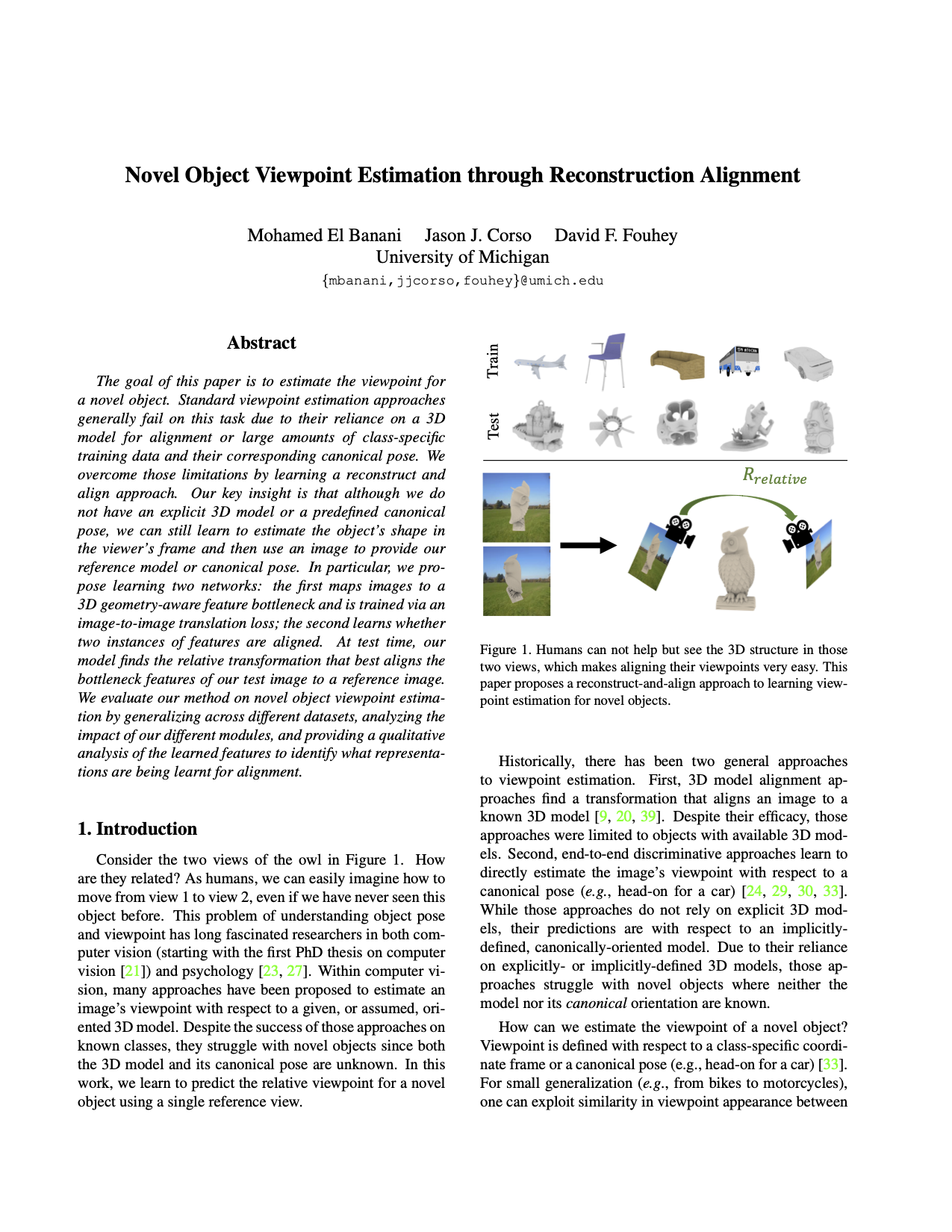
We overcome those limitations by learning a reconstruct and align approach.
Our key insight is that although we do not have an explicit 3D model or a predefined canonical pose, we can still learn to estimate the object’s shape in the viewer’s frame and then use an image to provide our reference model or canonical pose.
In particular, we propose learning two networks: the first maps images to a 3D geometry-aware feature bottleneck and is trained via an image-to-image translation loss; the second learns whether two instances of features are aligned.
At test time, our model finds the relative transformation that best aligns the bottleneck features of our test image to a reference image.
We evaluate our method on novel object viewpoint estimation by generalizing across different datasets, analyzing the impact of our different modules, and providing a qualitative analysis of the learned features to identify what representations are being learnt for alignment.
Overview Video
Paper
El Banani, M., Corso, J., and Fouhey, D.
Novel Object Viewpoint Estimation through Reconstruction Alignment
We would like to thank the reviewers and area chairs for their valuable comments and suggestions, and the members of the UM AI Lab for many helpful discussions.
Toyota Research Institute ("TRI") provided funds to assist the authors with their research but this article solely reflects the opinions and conclusions of its authors and not TRI or any other Toyota entity. This webpage template was borrowed from some colorful folks.